
 العربية
العربية
 English
English
نظام روبوت ذكي لخدمة الكافيه باستخدام ROS2
منذ يوم
عرض العمل
الوصف
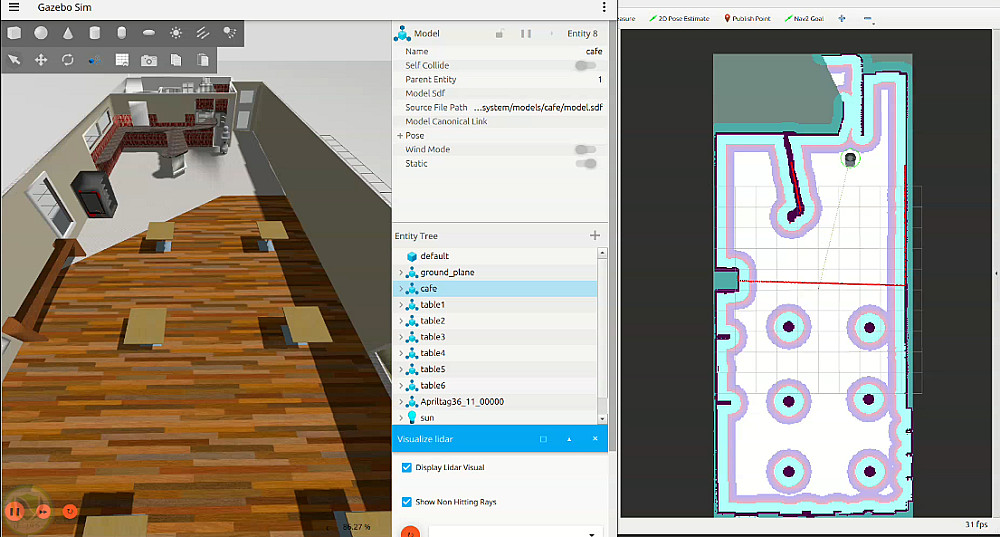
قمت بتطوير نظام روبوت متكامل لمحاكاة روبوت يقدم خدمات داخل كافيه بشكل ذاتي باستخدام ROS2 وGazebo.
🔹 ماذا يفعل النظام؟
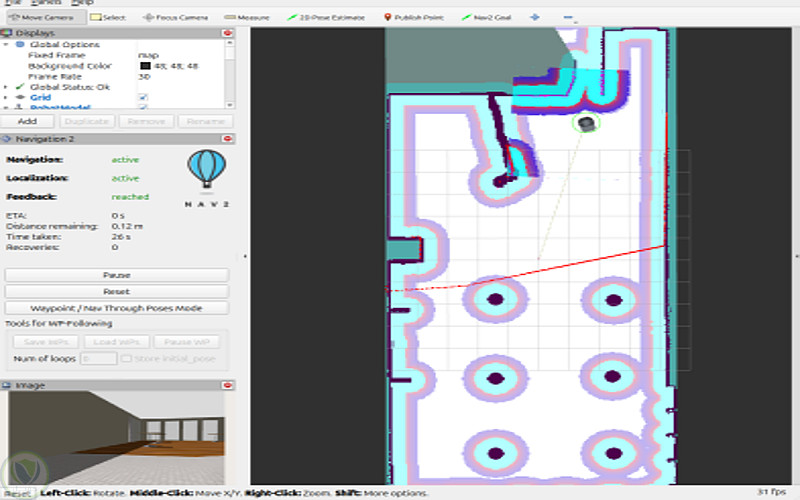
* التنقل الذاتي داخل البيئة (Autonomous Navigation)
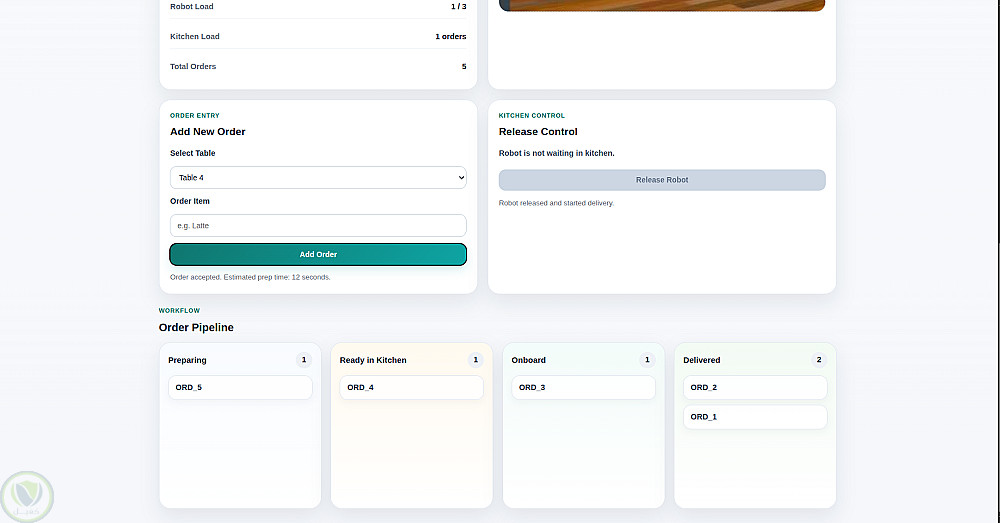
* استقبال الطلبات وتنفيذها
* توصيل الطلبات للطاولات
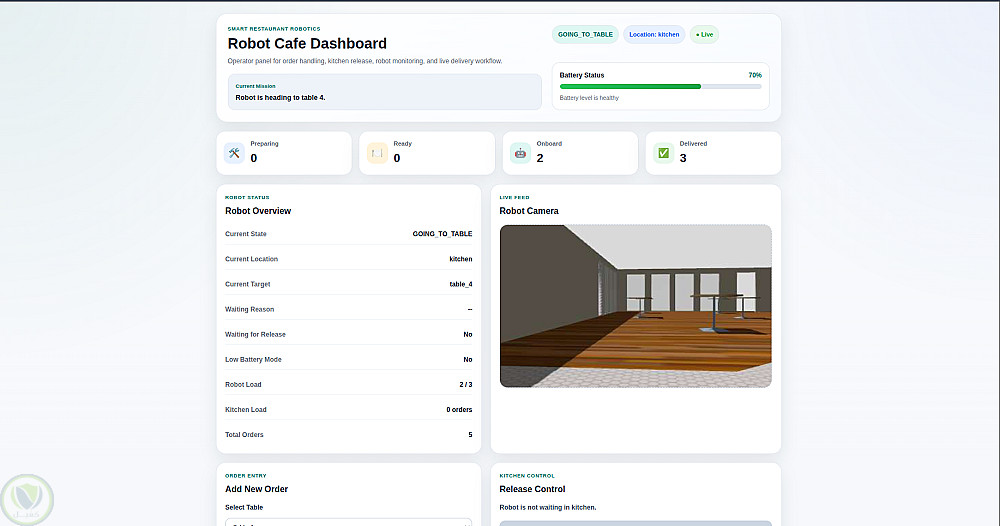
* عرض حالة الروبوت لحظيًا
* بث مباشر من كاميرا الروبوت
* محاكاة كاملة لبيئة كافيه (مطبخ – طاولات – شحن)
🔹 أهم ما تم تنفيذه:
* تصميم الروبوت باستخدام URDF/Xacro
* دمج حساسات LiDAR و IMU و Camera
* استخدام EKF لدمج بيانات الحساسات وتحسين تحديد الموقع
* إعداد Navigation2 للتحكم في الحركة الذاتية
* بناء نظام إدارة مهام (Task Manager) لتنظيم الطلبات
* تطوير واجهة ويب باستخدام Flask للتحكم والمتابعة
🔹 قيمة المشروع:
هذا المشروع يمثل نظام متكامل يمكن تطبيقه في:
* المطاعم الذكية
* روبوتات التوصيل
* المستشفيات والأنظمة اللوجستية
التفاصيل
| المشاهدات | 0 |
| المفضلة | 0 |
| القسم | برمجة, تطوير المواقع و التطبيقات - اخري |
حساب المستخدم

بائع مستوي: جديد
Robotics & AI Engineer
| اخر ظهور: منذ 12 ساعة
أنا مهندس ميكاترونكس أعمل على تطوير أنظمة الروبوتات والذكاء الاصطناعي، مع تركيز على بناء حلول تجمع بين السوفتوير والهاردوير. اهتمامي الأساسي هو بناء أنظ ....
وظفني